您当前的位置:
科技专利 >
一种用于四索牵引摄像机器人的专用运动控制器
一种用于四索牵引摄像机器人的专用运动控制器
 233
233 2018/08/17
2018/08/17
基本信息
-
专利类型
高等院校
-
委托机构
西安电子科技大学
-
专利持有方
西安电子科技大学
-
行业领域
机电一体化机械
-
项目名称
一种用于四索牵引摄像机器人的专用运动控制器
-
知识产权
发明专利
-
项目简介
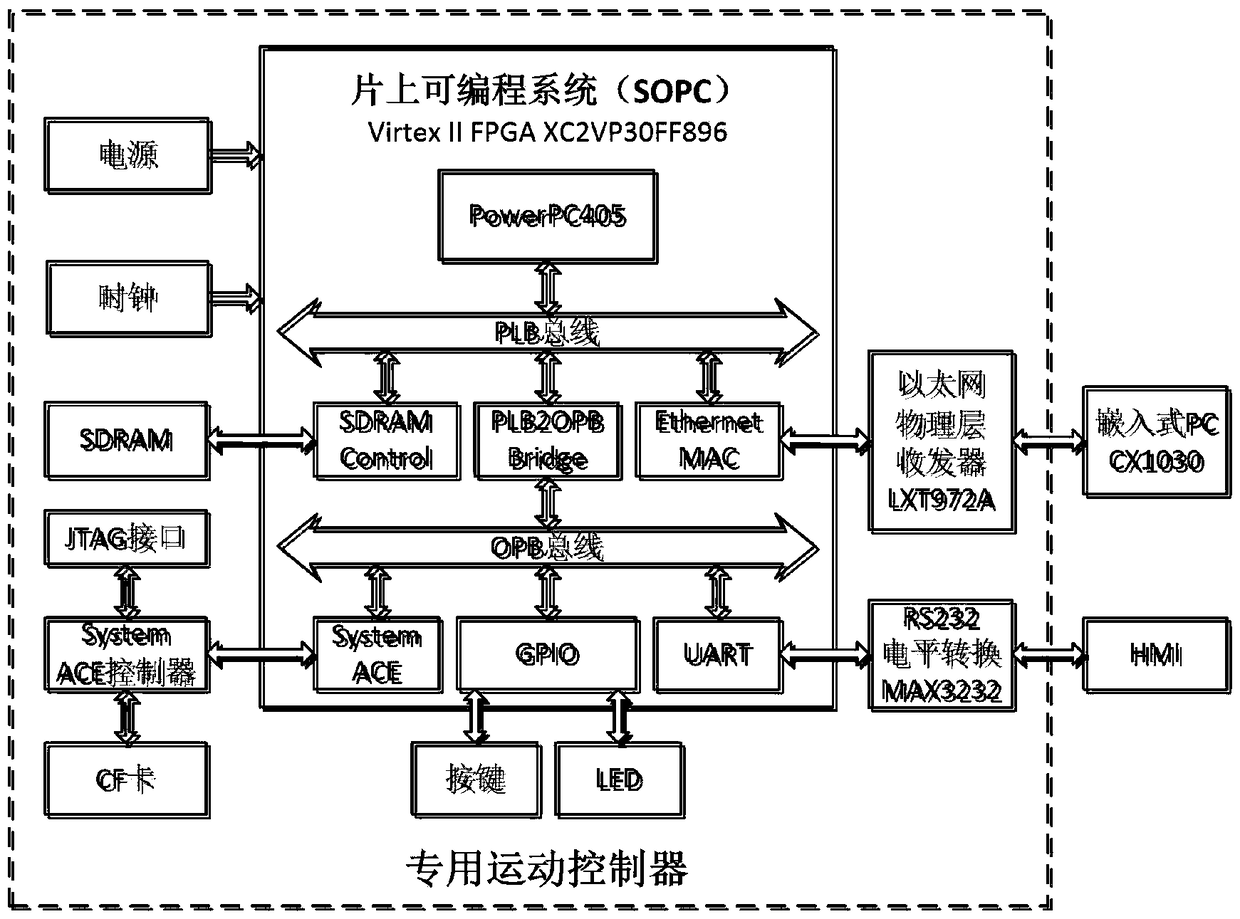
本发明涉及一种用于四索牵引摄像机器人的专用运动控制器。其主要由基于Virtex II系列现场可编程逻辑门阵列的可编程片上系统及其外围电路构成。FPGA片内SOPC功能模块根据四索牵引摄像机器人运动控制要求进行定制,主要包括硬核微处理器PowerPC405、处理器局部总线PLB、片上外设总线OPB、PLB转OPB桥、SDRAM控制器、以太网媒介访问控制器、UART、GPIO及系统级高级配置环境,所述的片内功能模块之间均逻辑连接;外围电路主要由电源、时钟、SDRAM存储器、ACE控制器及CF卡、按键、LED、以太网物理层收发器LXT972A、RS232电平转换器MAX3232组成,所述的外围电路均与FPGA电连接。采用SOPC技术实现运动控制器优化了系统的硬件组成,同时增强了系统的柔性。
-
交易信息
-
意向交易额
面议
-
挂牌时间
2018/01/23
-
委托机构
西安电子科技大学
-
分享至:

 咨询专利
咨询专利 发布专利
发布专利